
Absztrakt A ipari robotikai területeken a technológia rendkívül magas komplexitású eszközök előállítására képes. Bonyolult robotkarok jó eredménnyel alkalmazhatók az ipar több területén ismétlődő munkafolyamatok végzésére (festés, hegesztés). Azonban ezek az eszközök nem rendelkeznek a mobilitás adta előnyökkel. A technika fejlődésével, napjainkban már lehetőség nyílik viszonylag kis méretű bonyolult szenzorokkal felszerelt mobil robotok létrehozására, amelyek közlekedési, árutovábbítási, katonai vagy felderítési feladatokat látnak el. A mobil robotok fejlődése jól szemléltethető a 2004-ben és 2005-ben az USA-ban megrendezett "Grand Challenge" nevű verseny vizsgálatával. Cikkemben az autonóm szárazföldi robotok helyzetét, fejlődését, társadalmi elfogadottságát vizsgálom, elemzem az elért eredményeket és keresem az esetleges további fejlesztési lehetőségeket. Robotics has achieved a great success in industrial manufacturing. Robot arms in assembly lines can move with great speed and accuracy to perform repetitive tasks, but those industrial robots suffer from a disadvantage, the lack of mobility. In our days the advanced technology makes it possible to develop relatively small mobile robots equipped with sophisticated sensors. These robots can be used in transportation, or they can accomplish military scout tasks. A good example for the development of the mobile robots is the result of the competition called "Grand Challenge" in 2004 and 2005. In my article I analyze the state and development of the mobile robots, examine the social acceptation, conclude the reached accomplishments and search the probable development possibilities. Kulcsszavak: robotok, DARPA, grand challenge
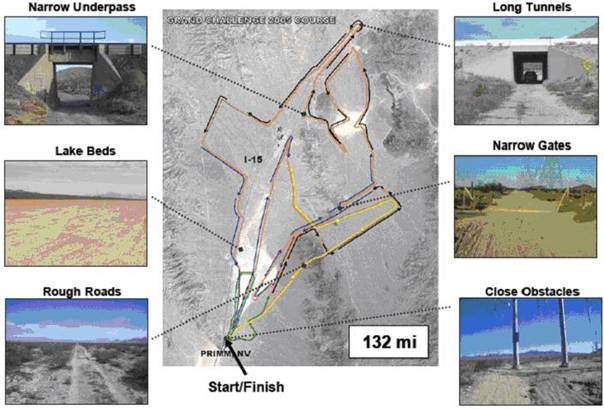
BEVEZETŐ A technika robbanásszerű fejlődése következtében napjainkban már olyan eszközök kerülnek alkalmazásra, amelyekről néhány évvel ezelőtt még álmodni sem mertünk. A telekommunikáció, a számítástechnika oly mértékben fejlődik, hogy ma már senki sem lepődik meg egy zsebben hordozható nagy teljesítményű processzorral rendelkező navigációs, kommunikációs rendszerrel felszerelt számítógépen, amely még mobiltelefonként és digitális fényképezőgépként is alkalmazható. A számítógép processzorok a mai szinten már képesek valós idejű képfeldolgozásra, bonyolult pályaszámítások elvégzésére. A következő terület, amelyet a robottechnika meghódítani készül, a közlekedés, árutovábbítás. A repülőgépek irányító és vészrendszereiben már szép számmal megtalálhatók automata robotrendszerek. A repülő kapitánya sok esetben már csak felügyeli a berendezések működését és probléma esetén beavatkozik. A katonai alkalmazásban már megtalálhatók az ember nélküli repülők (UAV2) mind sugárhajtásos, mind belső égésű motoros kivitelben (Predator, Gobal Hawk). Ezek a berendezések autonóm módon navigálva hajtják végre küldetéseiket, akár több száz kilométeres körzetben. A sikeres bevetéseken felbuzdulva az UAV-k mai generációi már csapásmérő fegyverekkel is el vannak látva. A GRAND CHALLENGE Autonóm földi járművek fejlesztése napjainkban már nem csupán katonai kutató laboratóriumokban történik, hanem a világ minden táján kutatók, egyetemi fejlesztések tucatjai foglalkoznak vele. A fejlődési folyamat legjobban szemléltethető a DARPA3 "Grand Challenge" két egymás utáni évben (2004-2005) megrendezésre kerülő versenysorozatának vizsgálatával. A DARPA kutatóintézetet az Amerikai Egyesült Államok Védelmi Minisztériuma hozta létre 1958-ban, a hidegháború időszakában a Szovjetunió sikeres űrkutatási programjának hatására. Nevéhez több ismemert alapkutatás kapcsolódik, úgy mint a mai Internet alapjául szolgáló hálózat, az ARPANet megalkotása, a GPS és a lopakodó repülőkkel kapcsolatos kutatások. A DARPA a "Grand Challenge " megrendezésével a civil kutatóintézeteket, egyetemeket kívánja bevonni az innovatív esetlegesen katonai és polgári célokra egyaránt alkalmazható fejlesztésekbe. A verseny fődíja 2005-ben 2 millió dollár volt, amely csak töredéke egy a versenyben résztvevő robot fejlesztési költségeinek, így a DARPA még jó üzletet is köt. A cél, olyan autonóm, emberi beavatkozás nélküli földi jármű fejlesztése, amely képes a megközelítőleg 130 mérföldes (210 km) távolságot 10 órán belül teljesíteni. A pálya koordinátáit közvetlenül a verseny előtt közlik a nevező csapatokkal, így nincs lehetőség a pálya előzetes bejárására, esetleges robotbetanításra. A pályán megtalálható az összes életben is előforduló tereptárgy : alagút, szűk átjáró, szerpentin, nehezen járható út, sivatagi környezet (1.ábra).
1 . ábra A versenyt több fordulós előfutamok előzik meg. A nevező csapatnak a közvetlen beválogatásra akkor van esélye, ha már bizonyította robotja megfelelő, biztonságos működését, leadta a szükséges technikai dokumentumokat. Ezt követően kerül megrendezésre a csapatok beválogatása (National Qualification Event), melynek keretében egy 2 mérföldes akadályokkal és fordulókkal megtűzdelt pályát kell bejárnia a nevező robotoknak. A fejlődést egyértelműen bizonyítja, hogy amíg a 2004-ben megrendezésre került versenyen a 142 mérföldes távból a legjobban teljesítő csapat is csupán 7,4 mérföldet tudott teljesíteni, addig a 2005-ben megrendezett versenyen már 5 csapat is sikerrel leküzdött e a bonyolult pályát. A Stanford Racing Team Stanley nevű Volkswagen Tourager R5 típusú módosított terepjárójának 6 óra 54 percre volt szüksége a táv megtételéhez, ami 30 km/h átlagsebességet jelent.
2 . ábra A DARPA által megkövetelt technikai dokumentációkba belepillantva érdemes összehasonlítani az egy év alatt véghezvitt konstrukciós változtatásokat, vizsgálni az alkalmazott fedélzeti szenzorokat. Ezen elemzésre a második helyezett Red Team robotját választottam, mivel ez a csapat mindkét évben részt vett a versenyen és a robotot csak 11 perc választotta el a győzelem megszerzésétől, így feltehetőleg technikai színvonala közel azonos a győztesével. Red Team 2004: Alap hordozóként, egy M998 High Mobility Multi-Wheeled Vehicle szolgált, amely egy jól bevált terepjáró típus. A fedélzeti számítógéprendszer három részre sorolható:
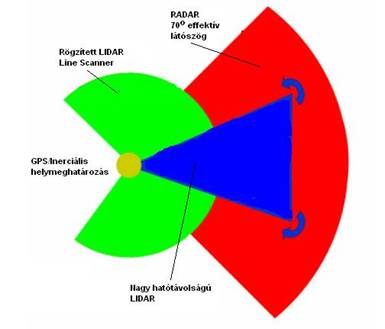
Az egységek közötti kommunikáció Ethernet hálózaton keresztül történik. A környezeti változásokat a következő szenzorokkal érzékelik:
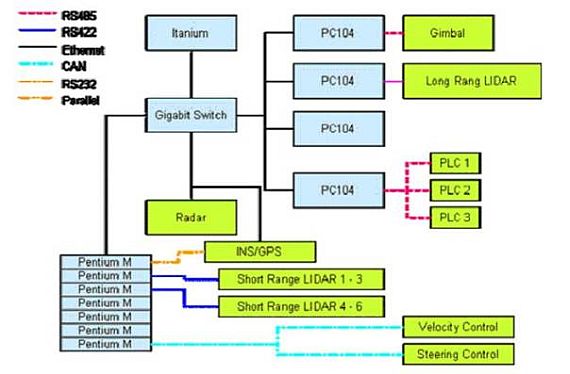
3. ábra A szenzorok rögzítése 3 tengelyen stabilizált platformra történik. A pozíció meghatározása GPS7-el kombinált inerciális helymeghatározással8 valsúl meg. Red Team 2005: A hordozó nem változott a 2004-ben használthoz képest, azonban a fedélzeti számítógépes struktúrában megfigyelhető a fejlődés. A fedélzeten megtalálhatóak az előző évben használt elemek, kiegészítve néhány új modullal.
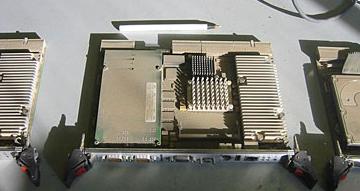
4 . ábra A szenzorrendszert három további normál LIDAR line scanner-rel egészítették ki, valamint módosították a szenzorok rögzítési módját. A fedélzeti számítógép rendszer központját a nagy sebességű Intel Pentium-M processzorokból felépített modul-rack rendszerű eszköz alkotja. Ez a speciális számítógép nem tartalmaz mozgó alkatrészeket. A tápegység és a processzor hűtése passzív módon van megoldva (5. ábra), valamint a merevlemezeket is FLASH alapú memóriával váltották ki. A mozgó alkatrészek, úgymint ventillátorok passzív hűtéssel történő kiváltása robosztusabb kivitelhez vezet, kiküszöbölhető a ventillátorok megszorulásából, mechanikai meghibásodásából adódó túlmelegedések. A hagyományos merevlemezek adattárolási megbízhatósága szintén nagymértékben függ az alkalmazási környezettől. Felépítésükből adódóan nem tolerálják a rázkódást, hirtelen gyorsulást, nagy hőváltozást, ezért indokolt a költségesebb FLASH memóriával történő kiváltás.
5 . ábra A 2004-ben felépített robot szenzor és irányító rendszerében nyilvánvalóan történtek változások, ám az igazi fejlődés az alkalmazott algoritmusokban tapasztalható. A robotot fel kell készíteni minden, a misszió teljesítése közben felmerülő helyzetre, problémára. Ez a folyamat már nem feltétlenül technikai fejlesztést, mint inkább algoritmusbeli, programozási tökéletesítést jelent. A csapatok a két verseny között eltelt évben nyilván sok időt áldoztak a robot különböző körülmények között történő tesztelésére, a tesztelés közben felmerülő problémák kiküszöbölésére, melynek eredménye az eltelt egy év alatt rendkívül szembetűnő. Hogyan tovább? A 2005-ben megrendezett versenyen bebizonyosodott, hogy jelentős távolságok áthidalhatók autonóm robotokkal, de vajon mit jelent ez a jövő technikai fejlesztései szempontjából. Abban minden bizonnyal mindannyian kételkedünk, hogy a közeljövő személygépkocsiait robotok vezetik majd. A technológiai feltételek ugyan már rendelkezésre állnak, tömegtermelés esetén robotvezérlésű járművek költségei jelentősen csökkenthetők lennének, de a társadalom azonban nincs felkészülve erre a hatalmas változásra. Az emberek szívesebben bíznak, például egy személyvonat esetében, az adott esetben kialvatlan, fáradt, alulmotivált embertársukban, mint egy teljesen robotizált vezérlésben. Ebben részben igazunk is van, mivel a robot azokat a funkciókat képes ellátni, amelyeket programjában előre meghatároztak. A ritkán előforduló szokatlan jelenségekre a robot nincs felkészítve, így a döntései kiszámíthatatlanok. A fejlesztésre két párhuzamos irányvonalat lehet felfedezni: 1. A robotnak biztosítani kell a lehető legkiszámíthatóbb környezetet. Ez például ipari, telepített robotkaroknál könnyen megoldható. Ha a robotkar egy futószalag mellett áll, az érkező terméken egy munkafolyamatot lát el, a környezet teljesen ismert és kiszámítható. Az egész gyártórendszer el van látva a megfelelő biztonsági szenzorokkal, ha ember lép tiltott területre, vagy bármilyen szokatlan jelenség lép fel, a robot leáll. Ezt a kiszámíthatóságot kell átültetni mobil robotikai alkalmazásokba is. A mobil robot csak egy előre meghatározott útvonalon haladhat, a környezet összes változása számításba vehető, így a robot hatékonyan és biztonságosan képes üzemelni. 2. Törekedni kell a valós környezet minél pontosabb leírására. Ha a robot emberek közelében hajt végre feladatokat, olyan szenzorokkal, döntéshozó rendszerrel kell ellátni, hogy képes legyen érzékelni és leküzdeni a környezeti akadályokat, legyenek azok statikusan vagy dinamikusak. Mobil robotot egy teljesen hétköznapi emberi környezetben üzemeltetni rendkívül bonyolult feladat lenne, mivel az ember, mint egyén meglehetősen nehezen modellezhető. Ha csak az emberi kíváncsiságot és lázadó kedvet vesszük alapul, számolni kell olyan egyénekkel, akik tudatosan próbálják a robot tevékenységét hátráltatni, ezzel megzavarva annak működését. Egy ilyen sikeres szabotázsakció esetén bekövetkezett baleset sokat ronthat a társadalmi megítélésen, és ezzel évekre visszavetheti a fejlődést. A két fejlesztési iránynak természetesen párhuzamos módon kell haladnia. Ha a "Grand Challenge" példáját tekintjük, a verseny alapvetően valós környezetben folyik, de az emberi tényező kivonásával mégis speciális izolált területen. A következő lépés lehetne egy olyan verseny meghirdetése, amelyben már dinamikus akadályok is megtalálhatók. Például adott útvonalon programozottan közlekedő járművek, melyekkel valós közlekedési helyzeteket modelleznek. Gondoljunk csak bele egy hétköznapi előzésre. Mérlegelni kell a megelőzendő jármű sebességét, figyelembe kell venni az útvonal beláthatóságát, ismerni kell gépjárművünk gyorsulási paramétereit és figyelembe kell vennünk az esetlegesen szembe jövő jármű távolságát és sebességét. Ilyen eseteket modellezve és a mobil robotot képessé téve egy ilyen helyzet leküzdésére tovább növelhető a robot fejlettségi foka és ezzel használhatósága. (A 2007 őszére tervezett verseny már várhatóan ilyen körülmények között kerül végrehajtásra). Társadalmi elfogadottság A mobil robotok társadalommal történő elfogadtatása nem történhet egyik napról a másikra, de már napjainkban is zajlik. Kis méretű mobil robotok már szép számmal megtalálhatók a háztartásokban, gondoljunk csak a porszívózó, fűnyíró robotokra. Kis méretük, tömegük folytán nem jelentenek veszélyt sem, az emberre sem az élővilágra. Anyagi károkozó képességük kicsi.
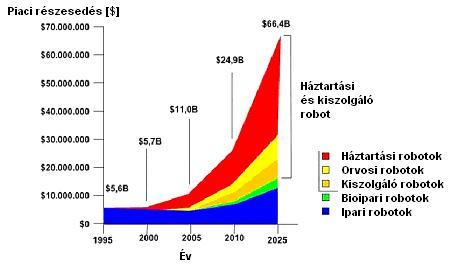
6 . ábra A mobil robotok várható értékesítéséről látható egy grafikon a 6. ábrán. Az ábrából látható, hogy a civil szférában, különösen a mindennapi életben használt robotok rohamos elterjedését jósolják a szakértők. A robotok elterjedésével, a bizalom is növekedhet, így olyan területeken is elfogadottá válhatnak mobil robotikai alkalmazások, ahol ma még nagy társadalmi ellenállás tapasztalható. ÖSSZEGZÉS A robotika fontos és dinamikusan fejlődő területét képezik a mobil robotikai kutatások. A szárazföldi autonóm mobil robotok terén is rohamosan fejlődés tapasztalható. Ezt bizonyítja az USA-ban megrendezésre került 2004 és 2005-ös "Grand Challenge". Míg 2004-ben a legjobban teljesítő csapat sem jutott 7,4 mérföldnél távolabb és az egész szakmai társadalom azt vitatta, vajon lehetséges e teljesíteni a több mint 200 km-es távot tíz óra leforgása alatt. 2005-ben már öt csapat is sikerrel végigjárta a kitűzött távot, sőt a legjobb csapatnak 7 óránál kevesebb idő is elegendő volt a táv teljesítéséhez. Ez a siker maga után vonhatja a mobil robotika további rohamos fejlődését, új területek meghódítását. A technika jelen állása szerint, a mai berendezések jelentős része is robotizálható lenne (vasúti közlekedés, repülő közlekedés, gyáron belüli árutovábbítás), de a mobil robotok még szokatlanok, bizalmatlanságot keltenek a mindennapi emberben. A társadalmi elfogadottság megszerzése hosszú, fokozatos folyamat, melynek első lépcsője lehet a kis méretű háztartási robotok elterjedése, a mobil robotok megismertetése. A mobil autonóm működésű robotok elterjedésével a jövőben olyan feladatok is robotokra bízhatók lesznek, amelyek ma technikailag még nem megoldottak, és a társadalom sincs felkészülve alkalmazásukra.
FELHASZNÁLT IRODALOM [1] Wührl Tibor, Robotkutatások - ismét "Grand Challenge" [2] Koncz Miklós Tamás, Ki és mikor fogja megnyerni a "Grand Challenge"-t, [3] Gácser Zoltán mk. őrnagy: Szárazföldi robotok. [4] Dr. Ványa László: Excepts from the history of unmanned ground vheicles development in the USA. [5] http://www.robonexus.com/roboticsmarket.htm 2006.01.20 [6] http://www.roboticstrends.com/sportsarticle728.html 2006.01.20 [7] http://www.darpa.mil/grandchallenge/ 2006.01.20 [8] http://www.darpa.mil/grandchallenge04/index.htm 2006.01.20 [9] http://www.darpa grandchallenge.org 2006.01.20 [10] http://www.darpa.mil/grandchallenge/techpapers.html 2006.01.20 [11] Stanford Raceing Team's Entry In The 2005 Darpa Grand Challenge [12] Red Team DARPA Grand Callenge 2005 Technica Paper Jegyzetek: 1 Zrínyi Miklós Nemzetvédelmi Egyetem Katonai Műszaki Doktori Iskola, doktorandusz hallgató 2 Unmanned Air Vehicle - Pilóta nélküli légi jármű 3 Defense Advance Research Project Agency 4 Az aktuátor olyan beavatkozó szerv, amely az elektromos jelet mechanikai mozgássá alakítja. Ilyen eszköz lehet egy villanymotor vagy egy szervórendszer. 5 A LIDAR egy lézernyaláb kibocsátásával, annak futási idő mérésével képes távolságot meghatározni. A lézernyaláb tükörrendszerrel történő eltérítésével, vonalszkennelés valósítható meg. 6 Frequency Modulated Continuos Wave radar 7 Global Positioning System - Globális helymeghatározó rendszer 8 Az inerciális helymeghatározás a jármű kerekeire szerelt elfordulás érzékelők (Encoder), gyorsulásérzékelők (Accelerometer), elfordulás érzékelők (Gyroscope) segítségével számítja a pozíciót egy kezdeti ponthoz képest. |

© ZMNE BJKMK 2007.