
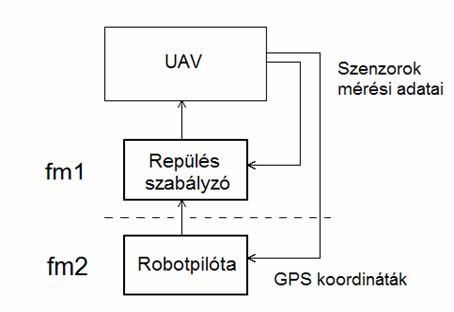
Bevezetés A robotkutatásokkal kapcsolatban napjainkban számtalan új eredmény születik. A robotok, mint bizonyos korlátok között működő autonóm, vagy ember által kontrollált fél autonóm eszközök iránt egyre nagyobb az igény mind a katonai-, mind a civil szférában. Az autonóm helyváltoztatásra alkalmas robotok esetén a tájékozódást legegyszerűbben egy helyzetmeghatározó rendszerre bízhatjuk. Jelenleg több tájékozódásra alkalmas helymeghatározó rendszer létezik, úgymint az amerikai NAVSTAR GPS, valamint az orosz GLONAS, valamint készülőben van az európai GALILEO. Jelenleg a civil alkalmazások leginkább az amerikai rendszerre épülnek. Az ok igen egyszerű, a kereskedelmi forgalomban immár tömegcikként kapható GPS vevők az amerikai GPS rendszer jeleinek vételére alkalmas. A helymeghatározó rendszerek hozzáférése ingyenes, de ne gondoljuk azt, hogy mindez "jótékonyságból" ered! Egy helymeghatározó rendszer használata függőséget jelent, a helymeghatározó rendszer műholdjai által sugárzott jel egy "gombnyomásra" kódolható, hozzáférhetetlenné tehető, vagy a kódolás pontatlan-, hibás helymeghatározást eredményezhet. A kis méretű UAV-k esetén olcsón és hatékonyan alkalmazhatjuk navigációra a GPS-t, de az alkalmazásból eredő problémákkal is számolnunk kell. UAV repülés szabályzó és robotpilóta rendszerstruktúrája Az UAV-k repülését, előre megadott feladatainak végrehajtását szabályzó körök teszik lehetővé, melynek egy egyszerűsített hatásvázlatát a következő ábrán láthatunk:
A működést irányító digitális jelfeldolgozó áramkörök mintavételi gyakorisága (fm1 és fm2) az eseményekben (változásokban) bekövetkező legmagasabb frekvenciájú komponenséből származtatható. A repülést szabályzó kör mintavételi frekvenciáját több tényező befolyásolja:
A robotpilóta "tájékozódását" az UAV fedélzetére épített GPS vevő által szolgáltatott koordináta adatok teszik lehetővé. A GPS jel megszűnése a szabályzó kör visszacsatolás megszakadását jelenti, míg a hibás koordináták megjelenése a rendszerben hibás rendelkező jelet von maga után. Navigációs, helyzet-meghatározó rendszerek Napjaink leghatékonyabb és legolcsóbb helymeghatározó rendszere a GPS. A GPS rendszerek használata általános felhasználás esetén díjmentes. Helymeghatározás tekintetében a jelenleg használatos rendszerek pontossága kielégítő, a helyzet néhány méteres pontossággal meghatározható. A digitális térben az autonóm robot, mint 3D objektum ábrázolása sok esetben egy pont. A pont aktuális helymeghatározása a digitális térben GPS-szel történhet. A GPS helymeghatározás időmérésre visszavezetett távolságmérésen alapul. A rádióhullámok terjedési sebessége ismeretében a meghatározandó pont távolsága az adott mérőjelet szolgáltató műholdtól kiszámítható [1] [3]. A kiszámított távolság egy adott mérőjelet szolgáltató műholdtól a számított távolsággal megegyező sugarú gömb felületet definiál, mely gömb középpontja maga a műhold. Egy másik műholdról érkező mérőjel észlelése esetén az előzőekhez hasonlóan szintén egy gömbfelületet kapunk. A két gömb metszi egymást, a metszetük egy kör lesz. A meghatározandó pontunk (vagyis a helyzetünk) a kapott körön helyezkedik el. Egy további (harmadik) műhold esetén is elvégezzük a távolság számítást, akkor ismét egy gömböt kapunk, mely gömb ismét metszi az előző gömböket. A helyzetet a közös metszéspont fogja jelenteni. A fenti gondolatmenet csak a működés elvét szemlélteti. Az alapelv sok gyakorlati buktatót rejt, ugyanis pontosan ismernünk kell a rádióhullámok kibocsátásának és a vevőbe érkezésének idejét. Az időmérésnek nagy pontosságúnak kell lennie, mivel a mérőjel futásideje (műholdtól a vevőig) átlagosan 0,06 másodperc. Abban az esetben, ha az időmérésünket 0,001 másodperces (1ms) hiba terheli, ez 300 km helyzet meghatározási pontatlanságot jelent. Ez okból a műholdakon nagy pontosságú (10-12 10-13 pontosságú, rövid idejű frekvencia stabilitású) atomórák működnek. A vevőben ilyen pontosságú órát elhelyezni nem lehet, elsősorban az ára miatt. A vevőben egyszerű kristály oszcillátoros óra üzemel, mely óra a műhold által sugárzott jel segítségével a műhold órájára szinkronoz. Természetesen a szinkronizálás csakis konstans hibával történhet a jel terjedési sebessége miatt. A konstans hiba kiejthető, ha egy negyedik műhold jelét is vesszük, vagyis a gyakorlatban a GPS vevő akkor szolgáltat viszonylag pontos koordinátákat, ha az egyszerre legalább négy műhold jelét veszi. Az amerikai NAVSTAR rendszer 24 darab 12 órás keringési ciklus idejű műholdból áll. A műholdak hat pályasíkon, egymástól 60 fokkal elforgatva keringenek. A Föld egyenlítőjéhez viszonyított pályaelhajlás 55 fok. A műholdak keringési magassága 20200 km. A földi felügyelő állomás öt helyen működik, négy feltöltő és egy központi vezérlő segíti az üzemeltetést. Az amerikai NAVSTAR GPS rendszert napjainkban több millió ember használja mind civil, mind katonai területen. A NAVSTAR rendszer üzemeltetése katonai kézben van. A felhasználók több ponton kiszolgáltatottak, hiszen ha a tájékozódásukat erre a rendszerre építik, akkor a rendszer "kikapcsolása", "lekódolása" vagy szándékos jel "torzítás" a tájékozódást lehetetlenné teszi. Ez a tény nagy mértékű kiszolgáltatottságot jelent, ezért a tengeri hajózás és a repülés területén a GPS használata csak egyéb kiegészítő navigációs rendszerekkel együtt lehetséges. Az Európai Unió ettől a kiszolgáltatottságtól kíván szabadulni és ezért saját GPS rendszer kialakítását és üzemeltetését tervezi [2]. Nemrég bocsátották fel az európai Galileo navigációs rendszer első kísérleti műholdját (Giove-A). A kilövés a kazahsztáni Bajkonúr űrközpontból történt, a hordozó rakéta Szojuz volt. A kísérleti hold 23260 km magasságban kering, keringési ideje 14 óra 22 perc. GPS koordináták bizonytalansága A GPS vevő által meghatározott koordináták sok esetben bizonytalanságot mutatnak, az egyes számított eredmények hibával terheltek [4]. A hiba okai a következők lehetnek:
Az Ionoszféra futásidő torzítása viszonylag állandó, ezért az korrekciós számításokkal viszonylag jól kiküszöbölhető. A fenti vételi problémák közül talán a legnehezebben a Troposzféra, mint időjárásfüggő torzítás jelentkezik. Az időjárásfüggő hiba nehezen korrigálható, gyakran az erősen felhős időben teljes, vagy részleges vétel kiesés is előfordulhat.
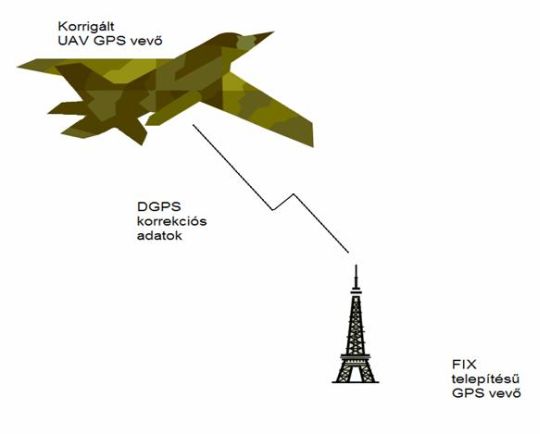
A fix telepítésű vevő pontos GPS koordinátái ismertek, így az általa detektált pozíció és a tényleges pontos koordinátákból a korrekciós adatok számolhatók. A korrekciós adatok UAV fedélzetre küldésének akkor van jelentősége, ha a fix telepítésű GPS vevő és az UAV közti távolság nem számottevő, vagyis mindkét vevő ugyanazon közegen keresztül "látja" a műholdakat. A robotkutatások során a koordináták hihetősége, valamint a hihetőség vizsgálat nagy jelentőséggel bír. Hihetőség vizsgálat legegyszerűbb esete a következő: Tételezzük fel, hogy a robotra rögzített GPS vevő másodpercenként szolgáltatja a vevő helyzetére jellemző koordinátákat. A robot A GPS vétel kiesés tesztek azt mutatják, hogy a vételi körülmények helyreállása után minimum 3-4 másodperc szükséges, hogy a GPS vevő a helyes koordinátákat szolgáltassa, rossz esetben ez az idő akár 40-50 másodperc is lehet.
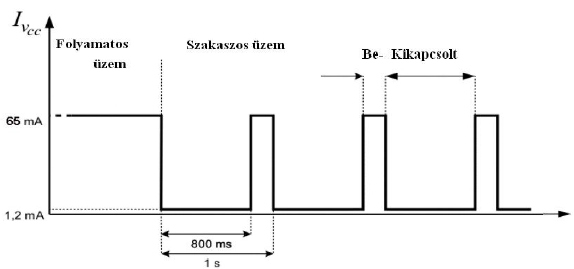
A fentiekből jól látszik, hogy a szenzorok többszörös tartalékolása az autonóm robotok esetében (például pilóta nélküli repülők - UAV-k) elengedhetetlen. A szenzor eredmények fúziója növeli a megbízhatóságot. Pontosság növelő tényező lehet az egyes mérési eredmények átlagolása. Az átlagképzés integráló hatása zaj- és mérési hiba csökkentő. GPS vevő modul Napjainkban a kiskereskedelmi forgalomban számos, jó minőségű, kis méretű GPS vevő modul vásárolható. A vevő modulok az alkalmazott csúcstechnikának köszönhetően olcsó tömegcikknek tekinthetők. Kis méretű UAV-k esetén a kis mérete és nagy pontossága miatt nagy sikerrel alkalmazható a FALCOM JP7 GPS vevő modul [3]. A 5. ábrán látható vevő modul mérete 25,4 x 25,4 x 3 mm. A modul SMD alkatrészként ültethető be az alkalmazásba. A tömege árnyékoló lemez nélkül körülbelül 2,5 gramm. A széles működési hőmérséklet tartomány (-40 °C - +85 °C) lehetővé teszi a kis méretű pilóta nélküli repülőkön történő alkalmazását. A mechanikai rögzítés során ugyanakkor figyelembe kell venni, hogy a modul maximum 20 m/s sebességű rázkódást és 4g gyorsulást képes elviselni meghibásodás nélkül. A GPS vevő modul által szolgáltatott koordináták pontossága 10 méter, DGPS esetben ez az érték 1-5 méteres pontosságon belüli [3]. A számított objektum sebesség pontosság 0,1 m/s, míg differenciális módban ez 0,05 m/s pontosságúra finomodik. A GPS vevő belső órája 1 µs pontossággal szinkronoz. További előnyként kell megemlíteni a csökkentett teljesítmény felvételi üzemmódot. Korábbi cikkemben számoltam be a pilóta nélküli repülők elektronikai tápellátás kérdéseiről és az elektromos energia hatékony felhasználásáról [5]. Az 1. ábrán látható modul támogatja a szakaszos működést, ezzel az átlagos teljesítmény felvétel (áram felvétel) jelentősen csökkenthető: A FALCON JP7 vevő modul áramfelvétele 3,3 V tápfeszültség esetén folyamatos működés esetén maximálisan 65 mA. Abban az esetben, ha koordinátákat csak másodperc gyakorisággal várunk a modultól, akkor minden egy másodperces ciklusban az idő 80%-ban a vevő modul alacsony tápáram felvételi (készenléti) üzemmódba kapcsolható, ami átlagosan csaknem 80% teljesítményfelvétel csökkenést jelent. A FALCON JP7 modul például a következő üzemmódban használható [3]:
1. táblázat: Ha a GPS vevőt bekapcsoljuk, akkor az megkezdi az aktuális pozíció, sebesség meghatározását, valamint szinkronizálja az óra áramkörét. Az átmeneti adatok (Ephemeris Data - "Gyors elévülésű adatok") begyűjtése után a GPS vevő a műholdak jelét folyamatosan követi és a koordinátákat ciklikusan számolja. A helyes pozíció meghatározásához minimum négy műhold jelének vétele szükséges. A vett és kalkulált adatokat a GPS vevő a belső SRAM-ban tárolja. Az SRAM-ban tárolt adatok aktualitása szerint a bekapcsolás utáni indulás kétféle lehet:
"Hot start" esetén a belső SRAM-ban az előző mérések eredménye még megtalálható és azok még részben aktuálisnak tekinthetők. Ennek feltétele az, hogy ne történjen jelentős mértékű pozíció változás a kikapcsolt állapot alatt. Pozíció változásnak tekintendő ebben az esetben a műholdak keringése is, vagyis a kikapcsolt állapot időtartama is meghatározó, nemcsak a GPS vevő pozíciójának megváltozása. A "hot start" körülbelül 8 másodperces időt jelent. Hideg indítás ("Cold start") esetén előző mérési eredmények nem állnak rendelkezésre, vagy azok már teljesen elévültek. Ekkor az indítási idő körülbelül 45 másodperc. A GPS vevő a mérési eredményeket és az abból számított koordinátákat soros kommunikációs interfészen juttatja el a feldolgozó számítógéphez, például a robotpilótához. A FALCOM JP7 GPS vevő modul két egymástól függetlenül működő soros kommunikációs interfésszel rendelkezik, mely CMOS szintekkel működik. Személyi számítógép (PC) soros aszinkron porthoz (V.24, RS-232) csatlakoztatás csak szintillesztő áramkör közbeiktatásával lehetséges. A soros interfész csatlakozási pontjai a GPS vevő modulon a következők:
Az interfészeken két elterjedt és általánosan alkalmazott protokollal történhet a kommunikáció:
A SiRF binárisan adja a pozíciót, sebességet, magasságot és státuszt. Az egyes mezőket a SPACE karakter (20h) választja el. UAV repülésbiztonsági kérdések Az UAV irányítása a robotpilóta döntései alapján történik. A robotpilóta szerves része egy térinformatikai rendszer, mely alkalmazástól függően lehet viszonylag egyszerű, vagy többszörösen összetett leképezés. A térinformatikai rendszer és a GPS vevő soros aszinkron vonalon kapcsolódhat. A kommunikációs vonalon keresztül bizonyos időközönként átadásra kerül a robot helyzete és az egy pontként jelenik meg a virtuális digitális térben. A robot mozgására és irányítására születő döntések tehát a virtuális térben történnek meg. A virtuális tér pontossága és aktualitása fontos tényezője az autonóm robotok helyes működésének. Hibás GPS koordináták, vagy GPS vétel kiesés hibás döntéseket eredményez. A hibás döntések az UAV zuhanásához vezethet, ezért az aktuálisan érkező GPS koordinátákat ellenőrizni kell.
Összegzés Korunkban a robotkutatások nagy ütemű fejlődését éljük át, mely fejlődést elsősorban a CHIP technológiák terén elért gyakorlati eredmények tettek lehetővé, ami a szabályzó elektronikáknak kis méretet, nagy tároló- és számítási kapacitást, valamint nagy megbízhatóságot kölcsönöz. A robotkutatások elválaszthatatlan módon összekapcsolódtak több, eddig egymástól szeparált kutatási területtel (számítástechnikával, szabályozástechnikával, térinformatikával stb.). Napjaink "autonóm" robotjai műholdas navigációs rendszer segítségével tájékozódnak és hajtják végre a feladataikat. A robotrendszereket emberi felügyelettel üzemeltetik, szükség esetén emberi beavatkozással - egy erre a célra kialakított kommunikációs csatorna segítségével - módosíthatók, felfüggeszthetők a küldetések. A pozíció adatokat szenzorok, GPS vevők szolgáltatják, a kommunikációs kapcsolatot pedig rádiós csatorna biztosítja. Mindezeknek a biztonságos üzemeltetés szempontjából kiemelt jelentőségük van. A kis méretű UAV-k lezuhanáskor jelentős anyagi károkat okozhatnak, és veszélyeztethetik az emberi életet is.
Irodalom [1.] http://terinformatika.geocentrum.hu [2.] Frey Sándor, Galileo 2006.03.18. www.urvilag.hu [3.] JP7_T_Family_1.05.pdf www.falcom.de [4.] Pázmányi Sándor, Dobos Attila, Pajna Sándor, A GPS-es helymeghatározás pontossági kérdései és alkalmazási lehetőségei a mezőgazdaságban. [5.] Wührl Tibor, Mikro méretű pilóta nélküli repülők repülésbiztonsági kérdései - elektromos tápellátás biztonsága; 2006 Szolnok [6.] 2006. május 13. Öcsény, nemzetközi modellbemutató |



© ZMNE BJKMK 2006.