
ROBOTHADVISELÉS 7. TUDOMÁNYOS SZAKMAI KONFERENCIA
2007. november 27.
KÜLÖNSZÁM |
![]() Kucsera Péter:
Kucsera Péter:
VÉDELMI CÉLÚ AUTONÓM MOBIL ROBOTIKAI ALKALMAZÁSOK DOKKOLÁSI MEGOLDÁSAI
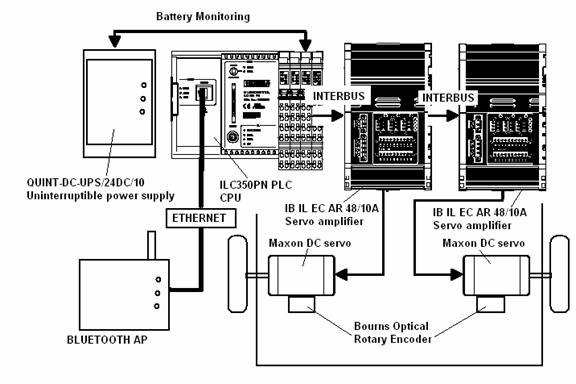
Szárazföldi mobil robotok alkalmazásánál mindig kritikus probléma, egy adott pontra adott irányban történő pontos beállás, dokkolás. A robot működéséhez szükséges üzemanyag energia pótlása csak valamilyen dokkolási megoldással oldható meg. Amennyiben a robot hasznos terhet hordoz és ennek a tehernek a cseréje, felrakása, levétele szükséges, a robotnak képesnek kell lenni egy adott pozícióba történő pontos beállásra. Cikkemben a dokkolás problémáját vizsgálom egy konkrét bemutató jellegű megvalósításon keresztül. A tervezett rendszer egy megfigyelő robotot modellez, mely egy nagy kiterjedésű területet tart megfigyelés alatt. A robot egy előre leprogramozott útvonalat képes bejárni, a fedélzetén található kamera segítségével képes az adott területről képinformációt szolgáltatni. Ha a fedélzeti energiahordozó fogytán van, a robot egy előre definiált pontra tér vissza, ahol lehetőség van a működtető energia pótlására, így a robot gyakorlatilag folyamatos működésre képes. Természetesen ugyanezen rendszer két vagy több dokkoló ponttal alkalmassá tehető különböző áruszállítási feladatok elvégzésére is, mind a katonai mind a polgári életben. Példaként említenék egy hasonló rendszert, mely már jelenleg is működik hazánkban, a Honvéd Kórházban. A 8 mobil robotból álló rendszer képes áruszállítási feladatok elvégzésére, teljesen autonóm módon. A robotok képesek liftet hívni és a szállítani kíván árun található RFID chip segítségével képesek beazonosítani a célállomást és meghatározni az útvonalat. 1. A fejlesztés oka A mobil robotikai fejlesztésekre és más innovatív megoldások kutatására nyújt lehetőséget a műszaki felsőoktatás kutatásba történő bevonása. Ezt a stratégiát követi a Phoenix Contact, mely egy német tulajdonú, automatizálási eszközöket is gyártó világméretű vállalat. A főiskolák bevonása egy XPLORE nevű nemzetközi verseny keretében történik, melynek célja új automatizálási megoldások kutatása. A Budapesti Műszaki Főiskola Kandó Kálmán Villamosmérnöki Karának dolgozójaként egy dokkolásra képes mobil robot megalkotásával jelentkeztem a meghirdetett versenyre. Mivel a zsűri beválasztotta csapatomat a versenyben résztvevők közé, a csapat 3000 eurós költségevetést kapott, az ötlet gyakorlati kivitelezésére. 2. A megvalósítandó rendszer felépítése A megvalósítani kívánt rendszer teljes felépítése az 1. ábrán látható.
3. A mobil egység felépítése A megvalósítás során nem volt anyagi lehetőség bonyolult mechanika kialakítására, így a robot mozgatása két függetlenül hajtott kerékkel és egy a platform mozgását követni képes támasztó kerékkel történik. A kerekek együttes azonos irányú és sebességű hajtása a robot egyenes haladását eredményezi, a eltérő sebesség kanyarodást eredményez. A kerekek ellenkező irányú hajtásával a robot képes a középtengelye körüli elfordulásra is. Az egyszerű mechanikai kialakítás alacsony költsége mellett rendelkezik még egy jó tulajdonsággal. Két függetlenül hajtott kerék esetében rendkívül egyszerű a robot pozícióját meghatározni a kerekek elfordulásának ismeretében. A mobil egység fedélzeti eszközeinek kapcsolatát a 2. ábra szemlélteti. A kerekek elfordulását a tengelyre szerelt optikai elfordulás érzékelőkkel (optikai enkóder) lehet detektálni. A motorok szabályzása speciális hajtásszabályzó blokkokkal történik, melyek az enkóderek jeleit feldolgozva, képesek a kerekeket egy adott fordulatszámon tartani, valamint képesek pozicionálási feladatok elvégzésére. Az egész rendszer vezérlését egy ipari PLC1 végzi, ipari valós idejű Ethernet hálózaton keresztül. A kapcsolattartás az operátorral szabványos BlueTooth vezeték nélküli összeköttetés segítségével lehetséges. A rendszer 24V-os tápfeszültségről üzemel, melyet egy ipari szünetmentes táp biztosít. Fontos megemlítenem, hogy a rendszer vezérlése teljes egészében ipari komponensekkel történik. A különböző modulok egy INTERBUS nevű ipari buszrendszeren kapcsolódnak egymáshoz, a rendszer bővítése a buszra történő további modulok felfűzésével lehetséges. Ipari elemek alkalmazása biztosítja a megfelelő megbízhatóságot, valamint a gyors fejlesztési időt. Mivel hardware fejlesztés nem szükséges, a rendszer konfigurálása és programozása után egy flexibilis, szabványos vezérlőrendszer hozható létre.
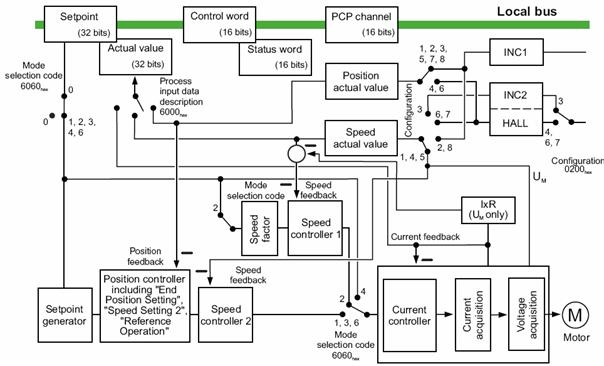
3.1 IB IL EC AR 48/10A Szervo hajtás Egy mobil eszköz működése szempontjából nagy jelentőséggel bír a hajtás minősége, megbízhatósága. Kis teljesítményű DC motorok hajtásvezérlése a legegyszerűbb a pulzus szélesség moduláció (PWM2) alkalmazása, így különböző kitöltési tényezőjű négyszög impulzusokkal megoldható a motor teljesítményének, ezen keresztül a fordulatszámának szabályzása. A szabályzó kör ellenőrző jele a már említett optikai enkóder lehet. Előnyös lenne azonban a motor fordulatszám szabályzását függetlenné tenni a PLC-ben futó rendszerprogramtól, mert egy bonyolultabb szabályzás jelentős részt emészt fel a rendszererőforrásokból. Az IB IL EC AR 48/10A szervo hajtás a motor fordulatszám szabályzásán kívül több plusz funkció elvégzésére képes. Képes a motor fokozatos gyorsítására és fékezésére. Ezzel a funkcióval megakadályozható a kerekek kipörgése, megcsúszása az indulásnál és megállásnál. A hajtásvezérlő paramétereit egy speciális kommunikációs csatormán lehet átküldeni a helyi buszon (Local Bus), így írhatjuk a megfelelő regiszterek tartalmát, beállítva ezzel az adott paramétert. A paraméterezés egyáltalán nem egyszerű feladat, 120 különböző regiszterből hozzávetőleg 30 regiszter beállítása szükséges a megfelelő beállítások eléréséhez. A sebesség megkívánt értékét (speed setpoint) egy eltérő módon szintén a helyi buszon vezérlő és állapotváltozókon keresztül lehet írni és olvasni. A modul sokoldalúsága rendkívül bonyolult felépítést és paraméterehetőséget eredményez, így használata egy kissé körülményes, azonban jelentős erőforrás-megtakarítást eredményez használata.
4. Szenzorok A mobil robot fedélzetén található szenzorok a következő csoportosítás szerint vizsgálhatók [1]:
A robotok fedélzetén található szenzorokat feladatuk alapján a következő csoportokba sorolhatjuk:
A kitűzött feladat megvalósításához a beltéri navigációra kell megfelelő megoldást találni, valamint szükséges a roboton egy alapvető akadályfelismerő rendszer kiépítése is. 4.1 A beltéri navigáció lehetőségei 4.1.1 Kerékelfordulás érzékelés A beltéri navigációra alacsony ára és megbízható felépítése miatt szinte leggyakrabban alkalmazott szenzor a kerekek elfordulását érzékelő általában optikai jeladó. A robot ismert mechanikai felépítését figyelembe véve és a kerekek elfordulását mérve a robot elmozdulás irányvektora kiszámítható. Egy gyakran használt mechanikai elrendezés látható a 4. ábrán. A robot két nagyobb méretű külön hajtott kerékkel és egy tetszőlegesen szabadon forgó támasztókerékkel rendelkezik. A hajtott kerekekre kapcsolt optikai jeladók által szolgáltatott elfordulás információból a robot pozíciója az [2.0]-[2.5] képletekkel számítható.
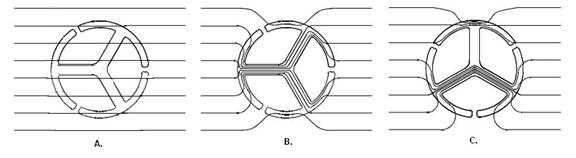
A kerékelfordulásból számított pozíció csak ideális esetben ad pontos értéket. Mivel a valóságban a kerekek gyorsításnál és lassításnál megcsúsznak. A módszer ebben a formában csak sík terepen ad megfelelő számított értékeket, így például egy szobai navigációra megfelelő de nem alkalmazható utcákon vagy természetben. A számítás idő szerint integráló jellegéből adódóan viszonylag kis arányú hiba a mérési idő növelésével felhalmozódik, így a mérési módszert mindenképpen ki kell egészíteni valamilyen abszolút helymeghatározási eljárással. 4.1.2 Elektronikus iránytűk Elektronikus iránytűvel abszolút módon meghatározható egy mobil robot iránya. A legegyszerűbb elektromechanikus iránytű egy jól csapágyazott tengelyből és az arra erősített állandó mágnesből áll. A tengely elfordulását optikai úton érzékelve információ nyerhető a föld mágneses terének irányáról. Ez a megoldás azonban bonyolultan kivitelezhet, rezgésekre rázkódásra érzékeny. A Fluxgate iránytűk a mágneses tér mágneses vezető anyagokon történő áthaladási tulajdonságán alapul. Ha a mágneses térbe mágneses vezető anyagot helyeznek, a mágneses tér erővonalai az alacsonyabb ellenállású anyagon igyekeznek áthaladni (5. ábra/B,C), amit ebben az esetben a mágneses vezető képvisel. Ha azonban a mágneses vezetőt egy külső mágneses térrel telítettségbe mágnesezzük, a telített mágneses vezető nem befolyásolja a mágneses erővonalak terjedését (5. ábra/A.).
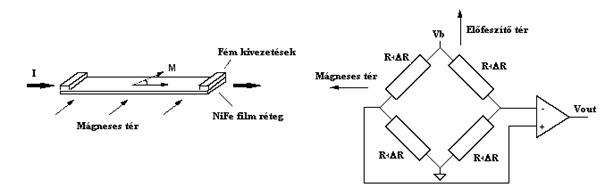
Az Anisortopic Magnetoresistive mágneses szenzor (AMR) vastartalmú vékony filmrétege külső mágneses tér hatására megváltoztatja vezetőképességét. A mérés négy Wheatstone-hídba kapcsolt szenzorra történik, a mérési elrendezés a 6. ábrán látható.
A fent említett mágneses tér érzékelő szenzorokon kívül előfordulnak még Hall effektuson alapuló mágneses tér érzékelő szenzorok is. 4.2 Akadályfelismerés 4.2.1 Futási idő mérésével történő távolságmérés A mérés során kibocsátott sugár a céltárgyról visszaverődve részben visszajut a kibocsátás helyére. A mérés során a kibocsátott és visszaverődött sugárzás futási idejét, azaz a kibocsátás és visszaverődés közt eltelt időt mérik. Ezen idő és a terjedési sebesség ismeretében a távolság számítható. A használt sugárzás lehet fény, hang, vagy mágneses sugárzás. 4.2.1.1 Ultrahangos távolságmérés Ultrahangos távolságmérésnél általában 40-180 kHz közötti hanghullámot sugároznak, egy szelektív vevővel pedig érzékelik a visszaérkező hanghullámokat. A terjedési sebesség szobahőmérsékleten 342 m/s, tehát, ha egy 3 méterre lévő tárgy távolságát kell megmérni, a futási idő körülbelül 20 ms, amely egyszerű elektronikai eszközökkel is könnyen mérhető. A viszonylag hosszú futási idő azonban lassú mérést eredményez. Egy 10 m/s sebességgel haladó robot esetén a robot 20 centimétert halad minden mérés közt. A hanggal történő távolságmérés másik hátránya a hang terjedési karakterisztikájából adódik. A hang főnyalábja körülbelül 30 fokos nyílásszögű kúpban terjed. Ebből az következik, hogy a szenzor csak azt képes megállapítani, hogy az adott 30 fokostartományban található-e akadály, vagy tereptárgy és az milyen messze van, annak pontos pozíciójáról azonban nem ad adatot. Egy mobil robot környezetének teljes lefedéséhez több szenzor szükséges. A szenzorok nem sugározhatnak egy időben, így a mérés időtartama a szenzorok számával arányosan nő. A fent ismertetett hátrányos tulajdonsága ellenére az elkészített mobil robot akadályfelismerő szenzorja is az ultrahangos távolságmérés elvén alapul. Ennek oka a szenzor egyszerű felépítése, megbízható működése és alacsony ára. 4.2.1.2 Lézeres távolságmérés Mivel ez a mérési módszer is a futási idő mérésén alapul, az elvek megegyeznek a fent leírtakkal. Jelentős különbség van azonban a kibocsátott sugár terjedési sebességében. A fény terjedési sebessége 3x108 m/s, így szintén 3 méterre található céltárgy esetén a futási idő körülbelül 20 ns (szemben a hangnál számított 20ms-el). A szenzor rendkívül gyors működésű, pontszerű lekérdezésre képes, azonban a rövid futási idők méréséből származó technikai problémák miatt, a szenzor nagyon költséges. Egyszerűbb konstrukciójú lézeres távolságmérési eljárást jelent 100%-os amlitudó modulált jel sugárzása, majd a visszaverődő lézersugár amplitudójának fázisösszehasonlítsa a kibocsátott sugárral. Az AM moduláció frekvenciája befolyásolja a mérési tartományt.
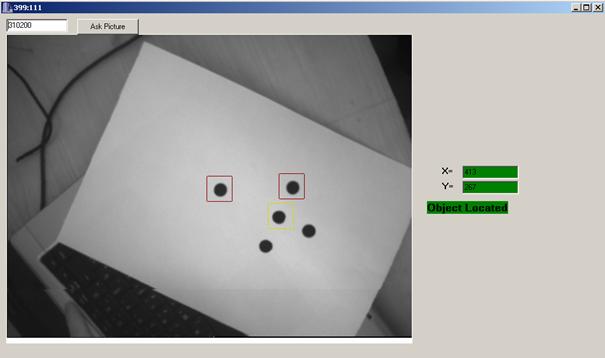
A 7. ábrán a SICK cég lézeres távolságmérés elvén alapuló szkennere látható. Az eszköz képes az előtte elhelyezkedő terület teljes lepásztázására, így jól alkalmazható mobil robotok fedélzeti akadályfelismerő szenzoraként. Sajnos a fejlesztés során nem állt rendelkezésre megfelelő költségvetés egy ilyen tudású eszköz beszerzésére. 4.3 Dokkolást segítő képfeldolgozó rendszer kialakításának lehetőségei A dokkolás igen kritikus művelet, melynek során a mobil robot rendkívül precíz helymeghatározási módszert kell, hogy alkalmazzon. A kerekek elfordulásából számított pozíció meghatározás alkalmas a pálya lejárására, de nem alkalmas a dokkoló-állomásra történő rávezetésre. Tipikus megoldás a dokkoláskor valamilyen irányfény, vagy sugárzás kibocsátása, melyet a robot észlelve képes követni és az elvezeti a megfelelő dokkolási pontba. Szintén alkalmazható a földre festett eltérő színű pálya, vagy vonal. Ezen megoldások korlátozottan képesek dinamikus környezetbeli működésre, mivel dinamikus objektumok (pl. mozgó emberek vagy járművek, esetleg egy másik robot) eltakarhatják a tájékázódást segítő jelzést. Előnyösebb, ha egy telepített helyen található fix rendszer képes felismerni, észlelni a mobil egységet, azt beazonosítva képes a megfelelő pozíció adatokat számára elküldeni. Az álltalam készített testrendszer is ezeket az elveket követi. Egy fixen telepített monokróm CCD kamera képét feldolgozó rendszer képes felismerni a robotra festett szimbólumot, és képes a szimbólum egy adott referenciaponthoz viszonyított koordinátáinak megállapítására. A képfeldolgozás első lépésében a kép világosságának átlagát kell leképezni, majd ezen átlaggal arányosan egy küszöbszinthez képest a képet szűrni kell. A szűrés után egy adott képpont értéke 1, ha a világossága nagyobb, mint az átlaggal arányos érték, 0, ha kisebb (2.7-es képlet). Ahol m(x,y)-az adott pont világosság értéke(brightness), ma -az átlagos világosság (avarage brightness), a-küszöbszint konstans értéke.
Ezzel az eljárással lehetséges a képből egy adott mérető tömör, sötét kör alakú szimbólum kiszűrése, melynek környezetében egy adott távolságon belül csak világos környezet található. A következő lépésben azt kell vizsgálni, hogy ezek a körök egy adott geometriai elrendezés szerint helyezkednek-e el. A 9.ábrán a vizsgált testelrendezés látható, mely 5 darab speciális geometriai elrendezés szerint elhelyezett fekete kiszínezett kört tartalmaz. Az elkészített program képes a szimbólum középpontjának koordinátáit megadni a képen belül, valamit képes megadni egy relatív irányszöget.
Miután a program meghatározta a szimbólum pozícióját, a kapott adatokat át kell, hogy adja a robotrendszernek. Ez kétféleképpen történhet. 5. Kommunikáció a robot és az operátor között A kommunikációs eszközök megválasztásánál az első és legfontosabb szempont a robot bevetési rádiuszának vizsgálata. Kis távolságokon, például robbanóanyag kereső robotoknál elegendő valamely informatikában használt vezeték nélküli adatátviteli eszköz használata. A kereskedelemben kapható WLAN4 hálózati eszközök között már nem ritka a 108Mbps átviteli sebességre képes illesztő eszköz, mellyel már jó felbontású valós idejű kép is továbbítható. Egy konkrét példát véve alapul, az ASUS WL-330G vezeték nélküli Access Point5 (AP) (1. ábra) 2.4GHz-es sávban maximálisan 54Mbps átviteli sebességre képes, belső térben 40 méteres, szabadtérben pedig 455 méteres hatósugárban. Az átviteli sebesség függ a környezeti zavaroktól, a rálátástól és a távolságtól. Az eszköz mobil robotikai alkalmazásra különösen alkalmas kis mérete (85 x 61 x 18 mm) [9], alacsony fogyasztása (4V, 1A), szabványos Ethernet hálózati csatolófelülete miatt. Szintén nem elhanyagolható szempont a készülék alacsony ára.
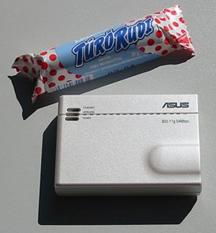
A 2.4 GHz-es sávban szintén elterjedt a Bluetooth6 vezeték nélküli technológia. Ez a technológia eredetileg számítógépekhez kapcsolt perifériaeszközök vezeték nélküli csatlakoztatására szolgált, ily módon csak kis működési rádiusszal rendelkezik (~10 m). A Bluetooth-nak azonban létezik ipari változata is, amely üzemekben, ipari környezetben, nagyobb távolságokra is képes kapcsolat létesítésére. Példaként említhető a Phoenix Contact FL BLUETOOTH AP nevű terméke (2. ábra). Az eszköz alacsonyabb átviteli sebességgel bír (400 Kbps), de ipari kiképzése miatt alkalmazható szélsőségesebb körülmények között is maximum 100 méteres távolságban.
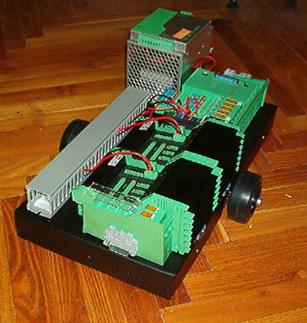
Közepes távolságú vezeték nélküli adatátvitel szintén létrehozható szabványos WLAN eszközökkel, irányított antennák segítségével. A nagy távolságú mikrohullámú kommunikáció hátránya, hogy az adó és vevő között elhelyezkedő tereptárgyak csillapítják vivőjelet. Erre jelent megoldást, műholdas átjátszók alkalmazása. Cikkemben a nagy távolságú vezeték nélküli átvitellel nem foglakozom részletesen, mivel a tárgyalt tesztrendszer alapvetően beltérben, labor körülmények között működik. 6. Az elkészült mobil robot, fejlesztés további lehetőségei Jelen pillanatban készen áll a mobil robot egység (12.ábra), mely már fel van szerelve a megfelelő érzékelőkkel, és képes azok jeleinek kezelésére. A robot képes a pozíciójának meghatározására és egy adott pálya lejárására. A következő lépés a dokkoló állomás elkészítése, valamint a teljes rendszer tesztelése a képfeldolgozó eszközzel (mely szintén készen áll). A verseny 2008 márciusában kerül megrendezésre, így még rendelkezésre áll elég idő a rendszer teljes kialakítására. ÖSSZEFOGLALÁS - KÖVETKEZTETÉSEK Mobil robotok fejlesztésével foglakozni napjainkban már feltétlenül szükséges, mivel egyre nő azon alkalmazások szerepe, melyeket mobil eszközök képesek elvégezni és melyekre emberi erő alkalmazása gazdaságtalan, veszélyes, vagy lehetetlen lenne. Megfigyelési feladatokra földi mobil robotokat alkalmazva emberéletek menthetők meg, növelhető az harcoló katonák túlélési esélye. A cikkben egy tesztrendszer lett ismertetve, mely labor körülmények között modellezi egy mobil megfigyelő rendszer működését, nagy hangsúlyt fektetve a dokkolás és energiapótlás feladataira. A dokkolás feladata igen kritikus, mivel a megfigyelő egység elhasznált energiáját pótolni kell a folyamatos működés elérése érdekében. A dokkolásra leginkább alkalmas helymeghatározási rendszer egy olyan képfelismerő egység, mely képes a robot felismerésére és a robot pozíciójának meghatározására, valamint ezen adatok robothoz történő eljuttatására. Fontos kihangsúlyozni, hogy ipari elemek alkalmazása jelentősen növeli a rendszer megbízhatóságát, mivel az iparban használt berendezések alapos tesztelési rutinon esnek át az értékesítés előtt, így olyan körülmények közt is képesek működni, ahol egy normál piacra szánt termék már nem.
FELHASZNÁLT IRODALOM [1] R.Siegwart, I.R. Nourbahsh "Introduction to Autonomous Mobile Robots" The MIT Press Massachutsetts institute of Technology Cambridge 2004 Jegyzetek: 3 OLE for process contreol (Object-Linking and Embedding) - Folyamatirányítási nyitott kapcsolat és beágyazhatósági szabvány
|

 [2.7]
[2.7]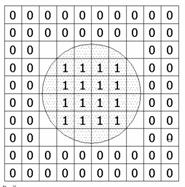

© ZMNE BJKMK 2008.