Absztrakt
A fejlesztés célja egy olyan kisméretű fedélzeti egység és a hozzá kapcsolódó földi programcsomag volt, amely univerzálisan alkalmazható minden kisméretű (1-20 kg felszálló tömegű, 10 Km akciórádiuszú) távirányított, részben vagy teljesen autonóm repülőgépek esetén. [1,2,3] A rendszer feladata a repülőgép fedélzetén üzemelő szenzorok adatainak (elsődlegesen GPS, sebesség és fedélzeti akkumulátor feszültség adatai) valósidejű vezeték nélküli továbbítása a földi kiszolgáló egység felé, valamint a továbbított adatok vizuális megjelenítése [5].
The purpose of development was a small sized onboard unit and a related terrestrial program package, which can be applied for all small sized, remote controlled, partially or fully autonom aeroplanes (taking off with 1-20 kgs weight with 10 Kms action radius) [1,2,3].
The task of the system is to forward data of censors (tension figures of primarily GPS, speed and onboard battery) operating onboard towards terrestrial service units real-time in a wireless way as well as have the forwarded data visually appeared [5].
A rendszer felépítése
A telemetriai egység két fő szerkezeti egységre tagolható.
- A repülő egység egy kisméretű nyomtatott áramköri lapra szerelt mikrokontroller és annak kiszolgáló elemeit tartalmazza. A modul kialakítása során elsődleges szempont volt olyan csatlakozási pontok kialakítása, melyek lehetővé teszik különféle repülő eszközök fedélzetén történő alkalmazását. A minél szélesebb körű alkalmazhatóság érdekében a modulra került egy GPS vevő és egy differenciális légnyomás érzékelő, amely a repülőgép levegőhöz viszonyított sebességét méri egy hozzá kapcsolt, ún. pitot-cső segítségével. A modul ezen kívül tartalmaz további analóg csatlakozási pontokat, melyek segítségével mérhetővé válnak a repülőgép fedélzeti akkumulátorai. Az 50 grammos egység nem igényel utólagos kalibrációt, így gyorsan és könnyen beépíthető számos kisméretű repülőgépbe.
Az adatok továbbítása az átfogni kívánt távolság függvényében kiválasztott adó egységgel történik. A telemetriai modul által előállított adatjelet a legtöbb RF adó modul képes fogadni és továbbítani.
- A földi egység egy demodulátorból és egy PC-s programcsomagból áll. A demodulátor a vevő által előállított jelből képes visszaállítani a repülőgép fedélzetén rögzített mérési adatokat és azokat soros vonalon keresztül továbbítja egy személyi számítógépnek. A számítógépen "futó" program feladata a telemetriai adatok grafikus megjelenítése.
A telemetriai egységhez kifejlesztésre került egy személyi számítógépeken működtethető programcsomag, amely grafikusan képes megjeleníteni a telemetriai adatokat, valamint képes azok archiválására is. A program célja egy mindenki által egyszerűen kezelhető kezelői és repülésellenőrzési felület kialakítása, melyen keresztül valós időben szerezhet információt a repülőgép kezelője.
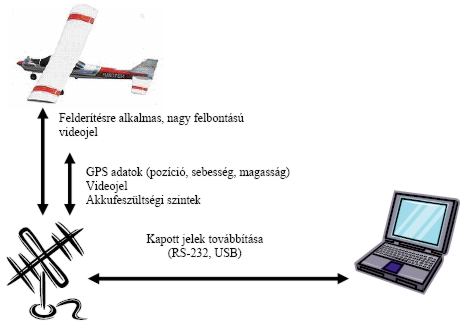
1. ábra, a robotrepülő rendszertechnikai diagramja
A repülő egység
Modulátor (1. kép)
A modul fő feladata, hogy a fedélzeti GPS egységtől érkező adatokat, valamint az analóg jeladók adatait illessze egy rádiófrekvenciás adómodulhoz. Ezt a feladatot egy PIC 16F628 típusú mikrokontroller látja el. A mikrokontroller beépített soros portján keresztül érkeznek a GPS adatok. Az analóg jelek a kontroller analóg portjaihoz csatlakoznak és egy beépített 10 bites A/D konverter digitalizálja. A továbbításra előállított adatcsomagot a modulon elhelyezett modulátor áramkör szinkronjelére ütemezve továbbítja a kontroller. Az átvitel sebessége 4880 baud, ami megegyezik a legtöbb GPS soros kommunikációs sebességével.

1. kép, a modulátor egység és a hozzá kapcsolt RF adó
A tesztelési tapasztalatok alapján a rendszer jó minőségű adatkapcsolatot biztosított számos repülés során. Mivel az adatok sebessége megegyezik a GPS adatszolgáltatási sebességével, a valós mérések során adatkésés nem volt tapasztalható.
A modul programozását követően nem igényel semmiféle további karbantartást. Használata kényelmes. Tekintettel arra, hogy a modul a GPS minden adatát továbbítja, lehetőség van a földi egységen olyan szerviz információk megtekintésére és elemzésére is, amiket egy "kézben tartott" GPS is lehetővé tesz. Ilyenek például a látott, illetve használt holdak adatai, az éledés folyamata, az aktuális GDOP (geometria pontosság) értéke, stb.
A földi egység
Demodulátor (2. kép)

2. kép, a demodulátor egység és a hozzá kapcsolt RF vevő
A modul fő feladata az RF vevőtől érkező jel demodulálása. A modul képes az adó oldalon továbbított adatcsomagok előállítására és azok soros porton történő továbbítására Az egységen elhelyezett PIC 18F2820 típusú mikrokontroller a demodulátor áramkör szinkronjelére előállítja az adó által elküldött adatcsomagokat. Az adatcsomagokat részben a beépített soros portján keresztül továbbtja egy feldolgozó egység (személyi számítógép) felé, részben pedig felhasználja azokat a vevő antennájának forgatása céljából. Az RS232 szabványú port sebessége 4800 baud.
Biztonsági megfontolásból a modul minden dekódolt adatot továbbít. Az adatok szűrését a személyi számítógépen "futó" program végzi, de az archiválás a szűretlen alapadatokkal történik. Ennek az az oka, hogy a hibás adatcsomagok között is lehet hasznos rész, ami különösen a repülőgép egy előre nem látott eseményének utólagos vizsgálata során lehet hasznos.
A modul programozását követően nem igényel további karbantartást. Az egység, bekapcsolás után azonnal üzemképes. A kis méret és az alacsony fogyasztás lehetővé teszi, hogy az áramkör közvetlenül a vevő közelében kapjon helyet, és annak tápegységéről üzemeljen.
A "Virtuális pilótafülke" program
A program feladata, hogy a repülőgépen mért adatok alapján valós időben képes legyen minden olyan információt megjeleníteni, ami a gép pillanatnyi állapotát valósághűen tükrözi. Ennek érdekében a gép GPS koordinátái alapján a program megjeleníti a megfelelő térképszelvényt és jelzi rajta a repülőgép pillanatnyi pozícióját, illetve a repülés addigi nyomvonalát. A képernyőn helyet kaptak a repülés szempontjából alapvető műszerek is. Ezek segítségével a kezelő azonnali és átfogó képet kap a repülőgép állapotáról. Ilyen műszerek a föld feletti és a levegőhöz viszonyított sebességmérők, a tengerszint feletti és a starthely feletti magasságmérők, a fedélzeti akkumulátorok feszültségmérői és a műhorizont. Ez utóbbi megjelenhet a repülőgépen elhelyezett kamera képe alapján, mint valóságos horizont, illetve a fedélzeten elhelyezett giroszkóp adatai alapján megrajzolt mesterséges horizont formájában.
A térkép modul
A térkép megjelenítésének feltétele, hogy a program rendelkezzen a pillanatnyi GPS koordinátának megfelelő, kalibrált "bitmap" alapú térképszelvénnyel. A térképszelvények tagolása tetszőleges, a felhasználó által meghatározott mértékű lehet. Az egyes szelvények kalibrációja egy erre a célra elkészített segédprogram segítségével oldható meg.
Tekintettel arra, hogy a megjelenítendő térkép egy tetszőleges "bitmap" állomány lehet, lehetőség van a hagyományos térképek helyett, megfelelően feldolgozott légi fotókat (ortofotó) is megjeleníteni (3. kép).
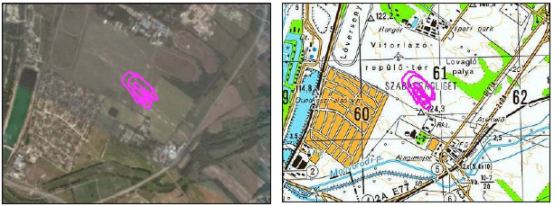
3. kép, a repülés nyomvonalának különböző megjelenítési lehetőségei
A gép repülése során a program folyamatosan rögzíti és megjeleníti annak pontos helyét és az addig megtett útjának nyomvonalát. A felhasználó tetszőleges időpillanatban készíthet nyomtatást (nyomtatóra fagy fájlba) a képernyőn látott adatokról. A nyomtatás alkalmával a repülés során érintett térképszelvények mindegyike rögzítésre kerül (a képernyőn csak a repülés egy kisebb környezete látható), így egy jól áttekinthető kép keletkezik.
A térképmodul folyamatosan figyeli a repülőgép pozícióját és ha az, az éppen megjelenített térképrészletet elhagyná, automatikusan megjeleníti az adott szelvény megfelelő részletét úgy, hogy a repülőgép a megjelenített részlet közepére kerüljön. Ennek köszönhetően a térképváltások nem zavaróak, mivel a váltást követően is látható a repülőgép addig megtett útjának utolsó szakasza. Egy adott térképszelvényen belül az aktuális térképrészletek megjelenítése (váltása) gyors, mivel a szelvény teljes terjedelmében a memóriában található. Amennyiben a repülőgép elhagyja az aktuális térképszelvényt, úgy a képváltás kis mértékben lassulhat, mert a program be kell, hogy töltse az új szelvényt a memóriába. Ez a folyamat az alkalmazott szelvény méretétől és az adott számítógép sebességétől függ. Tapasztalatok szerint a szelvényváltás okozta lassulás észrevehető, de nem zavaró. Előfordulhat olyan repülési útvonal, amely két térképszelvény határán lett kijelölve. Ekkor gyakori szelvényváltások keletkezhetnek, amik már zavaró lassulással párosulnak. Ennek elkerülése érdekében a program mindig két, egymással szomszédos (a legutóbb használt és az aktuális) szelvényt tárol az operatív tárban.
Magasság és sebesség diagram
A repülés folyamatainak ellenőrzése érdekében a program egy diagramon is megjeleníti a gép sebességi és magassági adatait. A diagram jól szemlélteti az elmúlt időszak értékeit, így láthatóak a gép viselkedéseinek tendenciái (emelkedés, gyorsulás, stb). A megjelenítés FIFO (First-In First-Out, azaz elsőnek-be, elsőnek-ki) jellegű, így a megfigyelhető adatok mindig a repülés utolsó 120 másodpercét szemléltetik. Lehetőség van a repülés teljes idejében mért adatainak rögzítésére is. A program az adatokat (az összes adatot, ami a telemetriai modultól érkezik) egy szöveges állományba menti. Az így rögzített állomány adatai később valós kapcsolat nélküli (Offline) újra lejátszhatók.
Virtuális "analóg" műszerek
A virtuális műszerek célja, hogy a kezelő egyetlen szempillantással megállapíthassa a gép a gép főbb repülési paramétereit [6]. A kijelzésnek nem célja az adatok abszolút pontosságú leolvashatósága (szükség esetén a pontos adatok a rögzített adatállományból kiolvashatók). A vett adatok egy medián és egy predikciós szűrő után kerülnek kijelzésre. A szűréseknek köszönhetően a kijelzés gyakorlatilag mentes a téves mérésekből adódó hibáktól.
A program jelenlegi állapota (4. kép)
- Térkép a követett objektum útvonalával
- Sebességmérő
- Magasságmérő
- Műhorizont (implementálás alatt)
- Repülési diagram
- Akkumulátor feszültségi szintek
- Kamerakép
- Megtett távolság méterben
- Magasság nullázó gomb (relatív/abszolút magasság beállítása)
- Naplózást irányító gombok (indítás/megállítás, megtekintés)
- A kommunikációs port beállítása (sorosport száma, státuszjelző "LED")
- Videorögzítés indítása/megállítása, élő közvetítés ki/bekapcsolása
- Felső menü
-
File: útvonal kezelési lehetőségek (betöltés, mentés)
- Beállítások: Az alkalmazás testreszabása (színek, megjelenítési skin, stb..)

4. kép, a "virtuális pilótafülke" képe
A program jelenleg biztosítja a térképes megjelenítést szelvénykezeléssel együtt. A magassági, sebességi adatok is megjelennek mind az "analóg" műszereken, mind a diagramon.
A videofelvétel élőben látható és rögzíthető [7]. A naplózási és az útvonalmentési szolgáltatás is elérhető. A szűrés hiánya miatt eleinte problémák adódtak a megjelenítéssel, de ezek implementálása után minden az elvárt módon működik. A műhorizont megjelenítése még fejlesztési fázisban van, a program felülete még nem konfigurálható és a nyelvi beállítások sem érhetők el.
Ezen funkcióktól eltekintve a valós körülmények közötti tesztméréseken az alkalmazás működőképesnek bizonyult. A tesztek Dunakeszin folytak.
Tapasztalatok, eredmények
A kísérletek során bebizonyosodott, hogy a telemetriai modul egyszerűen és gyorsan beszerelhető a projektben előirányzott paraméterű repülőgépekbe. Kis tömegének köszönhetően a repülések során a modul nem okozott érzékelhető változást a repülési tulajdonságokban. Az átvitel igen megbízhatónak bizonyult. Nem okozott gondot a jelek "leszakadása" sem. Amint a kapcsolat létrejött, az adatfolyam helyreállt és a rendszer hibátlanul üzemelt tovább.
A vett adatok a jelek a CRC ellenőrzések ellenére esetenként hibás tartalommal jelentek meg a rendszerben. Ennek kiküszöbölése érdekében medián (az impulzus szerű zajok kiszűrésére) és predikciós (a nem valós adatok kiszűrésére) szűrők kerültek beépítésre (5. kép). A szűrők valós időben képesek az adatok kezelésére, így a megjelenítő program érzékelhető időveszteség nélkül képes az információk megjelenítésére
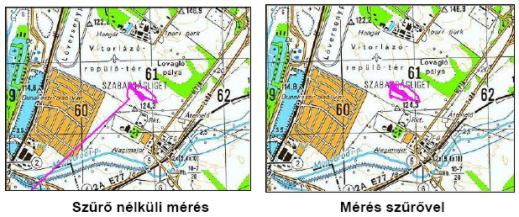
5. kép, a szűrők hatása a nyomvonal megjelenítésére
Felhasznált irodalom
[1] Field Report on Raven, Shadow UAVs From the 101st, Defense Industry Daily, 15-Nov-2005
[2] Syracuse becomes Predator territory, GuardTimes, May-June 2005, Volume 14
[3] Mary Ann Barraco Klement: Agile Support Project - Global Hawk Program
[4] B-HUNTER ATC integration and other futures - UAV NET Meeting #8 - SONACA - 22-23.09.2003
[5] Molnár András: A polgári és katonai robotjárművek fejlesztésében alkalmazott új eljárások és technikai megoldások. Ph.D értekezés, ZMNE, Budapest, 2006.
[6] Airplane instruments and systems, Revision 4 - 0105, Five By Five, Inc.
[7] Don R. Giandomenico: Wireless Video for Remote Control Aircraft
 Vissza a szöveghez Vissza a szöveghez
 Vissza a tartalomhoz Vissza a tartalomhoz
|
