
ROBOTHADVISELÉS 7. TUDOMÁNYOS SZAKMAI KONFERENCIA
2007. november 27.
KÜLÖNSZÁM |
![]() Ványa László:
Ványa László:
ALKALMAZOTT ROBOTTECHNOLÓGIA A MAGYAR HONVÉDSÉGBEN
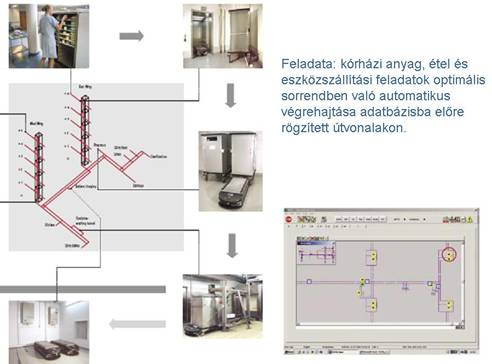
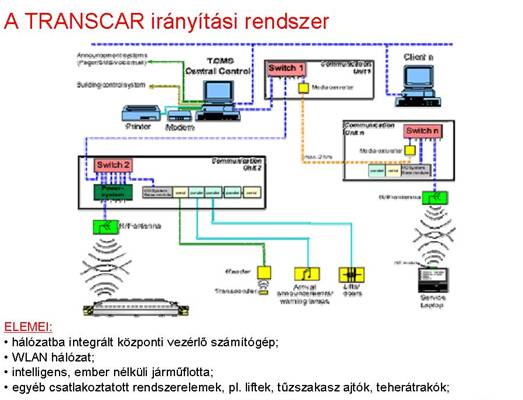
Absztrakt A 2007. évi 7. Robothadviselés konferencián hangzott el ez az előadás. A szerző bemutatja a SWISSLOG LTC2-FTS robotrendszert, amelyet az Állami Egészségügyi Központban alkalmaznak logisztikai támogató robotként. Az előadás második felében a SOFAR pilóta nélküli repülőgépet mutatja be, amelynek az előadás idején még folytak a kiképzési foglalkozásai. This lecture was presented on the 7th Robotwarfare conference. The author presents the SWISSLOG LTC2-FTS robot system, employed in the State Medical Centre, as logistic support robot. In the second part of lecture the author presents the unmanned aerial vehicle SOFAR, which manual training went in full swing in time of lecture. Kulcsszavak: SWISSLOG, robot, UAV, SOFAR BEVEZETÉS 2007-re a Magyar Honvédségben egy megvalósult rendszert és több, beszerzés vagy kiképzés alatt álló robottechnikai eszközt is találhatunk. Befejeződött az Állami Egészségügyi Központban a SWISSLOG LTC2-FTS logisztikai szállító robotjármű tesztelése és alkalmazásba vétele, folyik a SOFAR kis hatótávolságú pilóta nélküli repülőgép beszerzési eljárása és vele párhuzamosan az állomány kiképzése.1 Ezen kívül két műszaki, szárazföldi robot beszerzése is folyamatban van, amelyek a tűzszerész feladatok végrehajtásának támogatására kerülnek a tűzszerész zászlóaljhoz. Ezzel a két utóbbi eszközzel Gácser Zoltán előadása foglalkozik részletesen. A SWISSLOG LTC2-FTS LOGISZTIKAI ROBOTRENDSZER A kimondottan kórháztechnikai célokra fejlesztett svájci SWISSLOG LTC2-FTS robotrendszer rendeltetése típuskonténerek szállítási feladatainak központi vezérlésen alapuló automatikus végrehajtása előre definiált térben. Ez a tér az Állami Egészségügyi Központ (Központi Honvédkórház) ahol a konkrét feladata a kórházi anyag, étel és eszközszállítási feladatok optimális sorrendben való automatikus végrehajtása az adatbázisban előre rögzített útvonalakon. (1. kép) (2. kép) A kiépített szállítórendszer az LTC2-FTS robottargoncákból és a TRANSCAR irányítási rendszerből, valamint a szükséges támogató eszközökből áll. [1] A robottargoncák irányítását egy központi vezérlő számítógép végzi. Ez irányítja az összes jármű mellett az olyan periféria egységeket is, mint a tűzajtók, a felvonók és a teherátrakó állomások. (3. kép)
A szállítási feladatok megadhatók előre rögzített napi ütemezésben manuálisan, különböző eseményekhez kötve, vagy automatikusan generálva. A szállítási feladatok optimális ütemezésű végrehajtása során a program figyelembe veszi a szállítások sürgősségét, az egyes járművek pillanatnyi helyzetét és azok energiatartalékait. Amennyiben az akkumulátorok töltöttsége egy adott érték alá csökken, a robot még végrehajtja az éppen futó szállítási feladatot, majd az automata töltőberendezésre csatlakozik.
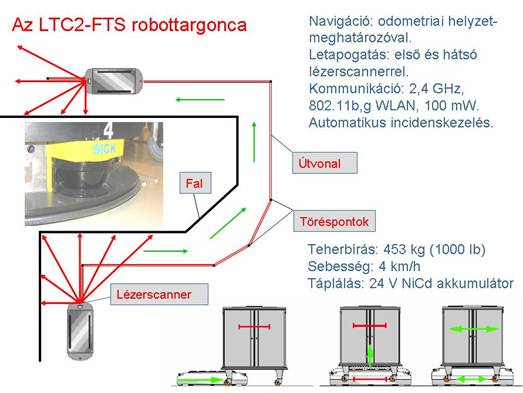
A járművek ólom, vagy NiCd akkumulátorokkal egyaránt használhatók. A fedélzeti számítógép egyik fő feladata az energiamenedzsment. Folyamatosan rögzítésre kerül az akkumulátorok töltöttségi szintje és jelentésre a TRANSCAR irányítórendszer felé. A járművek meghajtása és irányítása az orr-részben található kerékagymotorok segítségével történik, a kormányzást egy további másik kerék kormányrúddal való mozgatása segíti, ezáltal a robot kellő fordulékonysággal bír. [2] A jármű navigálása odometriai helyzet-meghatározó elven történik, vagyis a jármű hely és iránymeghatározása adott referenciapontokhoz, a letárolt környezetmodellhez viszonyítva történik. A jármű orr- és farrészén egy-egy lézerszkenner tapogatja le a környezetet, majd ezt hasonlítja össze a korábban felmért és digitálisan letárolt környezeti adatbázis adataival.(4. kép) Az útvonalon való manőverezés az adatbázisban lévő előre meghatározott, vagyis optimális útvonal, valamint a pillanatnyi mérések eredményeképpen kapott pozícióadatok különbségéből származik. Ezek a statikus adatok a valóságban a környezet változásából adódóan dinamikus adatokkal módosulhatnak, vagyis a mozgási útvonalakon személyek, tárgyak, másik robotjárművek bukkanhatnak fel, amiket meg kell óvni, a robot nem mehet neki semminek. Ilyenkor először lassít, és ha egy adott távolságnál közelebb ér, akkor megáll. A lézerszkenner mérései nyomán kidolgozza a lehetséges kikerülési, vagy két robot között például az átjárókon való áthaladási sorrendet. Az ütközések, sérülések elkerülése végett a járműveken vészkikapcsolók és mechanikus ütközéskapcsolók is vannak, amelyek azonnal leállítják a meghajtást. Ennek köszönhetően a mozgási utakat emberek és a robotok közösen használhatják. Az útvonal tervezésének és a méréseknek köszönhetően a robotjárművek egyes helyeken képesek a központi berendezésirányító támogatása, beavatkozása nélkül is célba érni. A járművek és a vezérlő számítógép között kétirányú vezeték nélküli LAN kapcsolat van, ezért az ellátási területre megfelelő lefedettséggel elérési pontokat (Access Point) kell telepíteni.
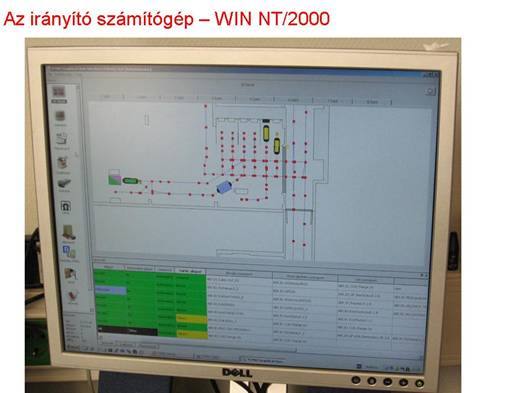
A rendszer működése A kórházban az egyes kiszolgálóegységeknél (konyha, gyógyszertár, mosoda, raktárak, stb.) valamint a kiszolgált egységeknél (kórházi osztályok) ún. indító és fogadó állásokat alakítottak ki. Az alaksorban helyezkedik el a konténermosó, fertőtlenítő, és mellette a központi konténertároló, amely a tiszta konténerek indító állomása. Itt található a robotok töltősora is, ahová egyidőben 6 robot csatlakozhat akkumulátort tölteni. A tervezett szállítások menetrend szerint folynak. A szállítási tervet a központi rendszerirányító számítógépen állítják össze és kezelik, ott követhető minden folyamatban lévő küldetés állapota. Akár minden napra más menetrendet lehet összeállítani. A szállítások helyzetét valós időben egy grafikus felületen lehet figyelemmel kísérni, amelyen valamennyi állomás, útvonal, minden robot és a rá vonatkozó attribútumadatok jelennek meg különféle színjelzésekkel. A rendszerben gyűjtött összes adat eltárolásra kerül, bármikor újra lehívható, különféle szempontok alapján szűrhető, elemezhető, időben visszajátszható. (5. kép) A konténeres szállítási megbízások egyedi azonosítására rádiófrekvenciás feladatazonosítókat - transzpondereket alkalmaznak. Ezekbe a korong alakú egységekbe az indulóállomásra, pl. konyha, valamint a célállomásra, pl. valamely kórházi osztályra vonatkozó információk fixen be vannak programozva, kívülről jól látható módon fel vannak tüntetve. A szállítás megkezdése előtt az adott osztályon a konténerre felerősített transzponderzsebbe helyezik a transzpondert és a küldő állomásra állítják. Itt a kívánt célállomást az olvasóegység kiolvassa és elküldi a központi számítógépnek. Megvizsgálja, hogy ez egy menetrendben tervezett szállítás-e, és ha igen, akkor a következő szabad robotot elküldi a szállítás végrehajtására. A jármű elgurul a konténerhez, alámegy, felemeli és elviszi a célállomásra.
A fogadóállásra érkezést egy optikai eszköz is észleli. A konténerek menetrend szerinti begyűjtéséhez elegendő őket az indítóállásra tolni, a robotok a megfelelő küldő állomásra szállítják őket. Ha rendkívüli szállítási igény merül fel, akkor a számítógép kiválasztja a feladat végrehajtásához rendelkezésre álló robotot és betervezi az éppen folyó aktuális feladatok közé. A szállításokhoz prioritások is rendelhetők, amelyek a végrehajtási sorrendet akár alapjaiban is képesek megváltoztatni. A rendszer az üzemeltetők szerint beváltotta a vele szemben támasztott elvárásokat, megbízhatóan működik. A kezelése egyszerű, a küldő és fogadóállomások személyzetét igen rövid eligazítással meg lehetett tanítani a rendszerrel kapcsolatos teendőkre és a hibamentes üzemeltetésre.
A SOFAR pilóta nélküli repülőgép Mint a honvédelmi vezetés korábbi sajtónyilatkozataiból is nyilvánosan ismert, folyik egy kis hatótávolságú, pilóta nélküli repülőgép pályázati úton való beszerzése. A beszerzés célja az, hogy az időben megszerzett felderítési információk segítségével felfedhetők legyenek a békefenntartó missziós konvojok mozgására, a stacioner objektumokra, táborokra veszélyt jelentő támadások jelei. Ezek az eszközök egy nagyobb, átfogó védelmi elgondolásnak (Force Protection), a külszolgálatot teljesítők védelmét szolgáló rendszabályoknak, technikai felszereléseknek elemei. A tendert 2006 szeptemberében írta ki a MK pilóta nélküli repülőgép beszerzésre. A tenderkiírás a nemzetközi értékelés szerint igen szigorú feltételeket szabott a pályázók számára. Néhány főbb követelmény a pályázati kiírásból:
Talán ennyiből is jól érzékelhető, hogy a kimondott műszaki követelmények teljesítésén felül igen sok hatósági eljárás lefolytatása is szükséges ahhoz, hogy az ajánlattevő a berendezést a megrendelőnek alkalmazható állapotban átadhassa. Az első körben három pályázó indult:
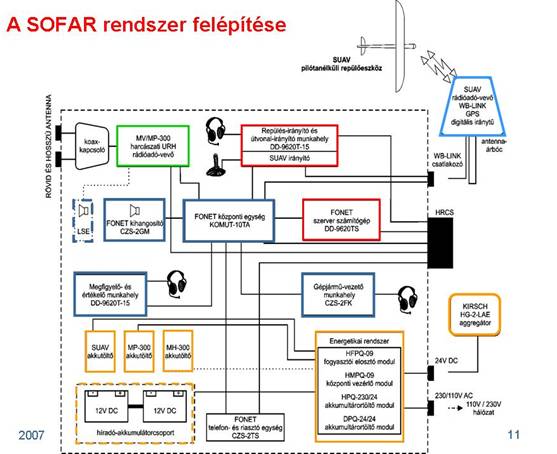
Győztesként a WB Electronics-ot hirdették ki a tenderben, amely bár az Elbitnél magasabb árat adott meg, de több műszaki előnnyel. A szerződés részeként Magyarországon megindult a gépjárművek beépítése, a gyakorlati felkészítés és a kijelölt kezelőállomány kiképzése. A kiképzést az ÖHP bázisain, oktatási egységeiben és gyakorlóterein hajtotta végre a kezelőállomány, amelybe külső szakértőket is bevontak. A rendszer nagybani technikai felépítése a 6. képen látható.
Az elméleti, alapozó képzés során a kezelőállomány térképészeti, aerodinamikai, híradó, térinformatikai, számítástechnikai, felderítési, képfeldolgozási és más foglalkozásokon vett részt. Az egyes elméleti kérdéseket a konkrét berendezésen demonstrálva, az alkalmazási helyzetekre való felkészülés érdekében a lehető leggyakorlatiasabban tárgyalták az előadóikkal. Az elméleti képzés mellett igen nagy óraszámban foglalkoztak a repülés előkészítésével, az állomások telepítésével, üzembe helyezésével, a repüléstervezéssel, a gyakorlati repüléssel, a célfelderítési feladatok végrehajtásával, az eszközök karbantartásával, technikai kiszolgálásával. (7. kép) A repülési feladatokat zárt légtérben, katonai lőtereken hajtották végre. A kiképzés csúcspontja volt a Bevetési Irány 2007 gyakorlaton való bemutatás, amely során a szemlélők nagyméretű video kivetítőn követhették nyomon a repülőgépek kamerái által közvetített képet.
Jelen cikk megírásának idején már ismert tény, hogy a rendszer szállítási szerződését műszaki és átadási problémák miatt felbontották. Ez számunkra, a robottechnika elkötelezett hívei számára nagyon rossz hír, de bizonyára alapos okok tették ezt szükségessé. Ugyanakkor a kiképzett állomány olyan tudás birtokába került, amelyet egy bármely más típus beszerzése során is képes lesz hasznosítani, ezért semmiképpen nem elvesztegetett idő és energia volt ez a néhány hónapos kiképzési időszak. Tapasztalatokat szereztek mind a pályázat kiírói, mind a szakmai alkalmazók is, és bízzunk benne, hogy ezeket a tapasztalatokat a továbbiakban sikerül hasznosítani. Befejezés Összességében elmondható, hogy a robottechnika iránt elkötelezett kutatók, oktatók hosszú évek óta folytatott kutatási és publikációs tevékenysége nem volt eredménytelen, sikerült a döntéshozókat meggyőzni a fejlesztések, beszerzések szükségességéről meggyőzni, megtört a jég és megkezdődött a magyar Honvédségben is ezen eszközök alkalmazásának korszaka. Bízzunk benne, hogy a most beszerzett tűzszerész robotok, a közeljövőben beszerzendő kis hatótávolságú pilóta nélküli repülőgép a maga területén legalább olyan sikeres és hasznos lesz, mint amilyen hasznosan és megbízhatóan látja el a maga feladatát a békésebb körülmények között üzemelő Swisslog LTC2 robot. Reméljük, hogy a következő Robothadviselés 8 tudományos konferencián további sikerekről számolhatunk be.
Felhasznált irodalom [1] SWISSLOG LTC2-FTS rövid rendszerleírás. ÁEK Üzemeltetési Osztály, Budapest. [2] TransCar AGV System Components http://www.swisslog.com/hcs-agv-transcar-components.pdf (2007. 11. 01.) [3] Kovács László-Ványa László: Pilóta nélküli repülőgépek kutatás-fejlesztési tapasztalatai Magyarországon. Hadtudomány, MHTT Budapest, 2007. XVII. évf. 2. szám. 50-61. p. Jegyzetek: 1 Sajnálatos módon az előadás elhangzása után néhány nappal született meg a döntés arról, hogy műszaki és átadási problémák miatt a SOFAR rendszer nem kerül megvásárlásra, újabb beszerzési folyamat indul. |


© ZMNE BJKMK 2008.